QTrobot Sound and Speech
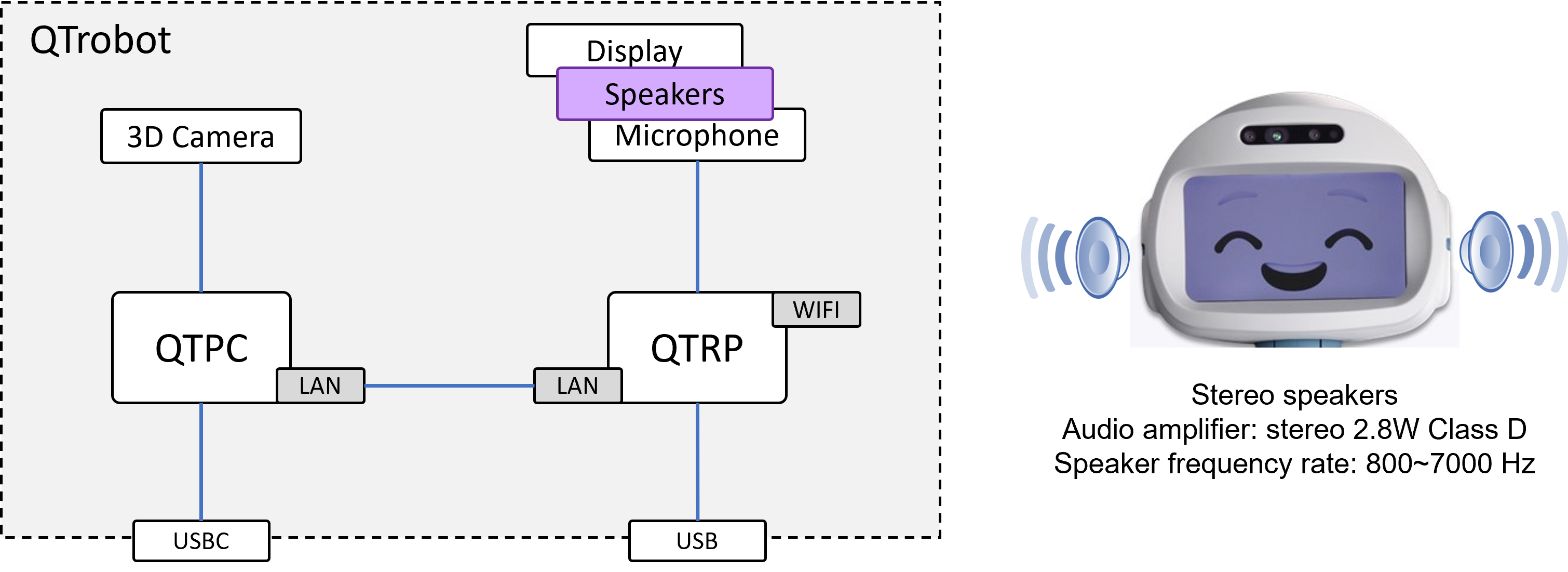
QTrobot has double speakers powered by 2.8W stereo amplifier. The speakers are connected to Raspberry PI (QTRP) audio analog output via the amplifier. That provides a standard Linux audio device which you can use freely for playing sounds.
Software Interface
The qt_robot_interface ROS node is the QTrobot's driver for speech and audio. This node implements varieties of ROS interfaces including Speech Interface for Text-to-Speech and the Audio Interface for playing any audio files.
Speech
The QTrobot's Text-to-Speech service is based on Acapela software. Depends on your robot and purchased languages/voices, the Acapela pre-installed voice data can be found in /home/qtrobot/acapela/voices folder. The default language along with other properties such as speed and pitch are configured using /opt/ros/noetic/share/qt_robot_interface/config/qtrobot-interface.yaml config file. Under speech section you will see corresponding lines.
playback_device: hw:1,0
speech:
engine: acapela
acapela:
path: '/home/qtrobot/robot/acapela/'
language: en_US
speed: 80
pitch: 150
voices:
en_US: enu_ella_22k_ns.qvcu
en_SP: enu_valeriaenglish_22k_ns.qvcu
de_DE: ged_lea_22k_ns.qvcu
fr_FR: frf_valentin_22k_ns.qvcu
...
Audio
QTrobot audio interface can play standard audio files with mp3 or wav format. The default folder where the interface looks for the audio files is /home/qtrobot/data/audios. QTrobot comes with some audio examples. You can play any audio file that is in the audios folder using service call or ROS publish command as shown bellow. You can also play audio files using Educator tablet.
Publisher:
rostopic pub /qt_robot/audio/play std_msgs/String "data: 'QT/Komiku_Glouglou'"
Service call:
rosservice call /qt_robot/audio/play "filename: 'QT/Komiku_Glouglou'
filepath: ''"
As it shown in the above example, you do not need to give the audio's file extension (.wav or .mp3) to the interface!
How to play custom audio?
To play custom audio file, you first need to copy it in the default audios data folder (/home/qtrobot/data/audios) on QTRP. Next you can repeat any of above shown command to play your audio on QTrobot speakers. Let's look at the example.
- Audio name: "song.wav"
- Audio path: "/home/qtrobot/data/audios/song.wav"
Example:
rostopic pub /qt_robot/audio/play std_msgs/String "data: 'song'"
How to adjust the volume?
You can change the volume of the speaker in different way:
- Using Educator tablet app
- Calling
/qt_robot/setting/setVolumeROS service (via coding, command line ROS commands or QTrobot Visual scripting) - Using standard Linux tools such as
alsamixer
Adjusting volume using ROS service call:
rosservice call /qt_robot/setting/setVolume "volume: 60"
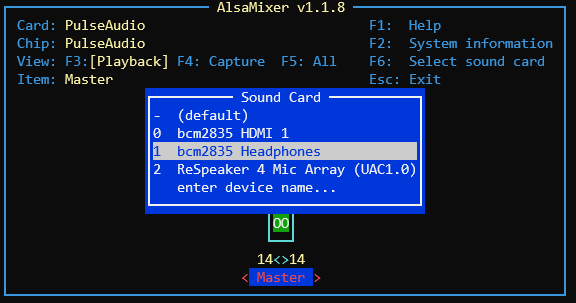
Adjusting volume using alsamixer of QTRP:
Access QTRP terminal via SSH and run alsamixer command. Select the bcm2835 Headphone sound card by pressing F6 and finally use keyboard arrows up/down to change the volume.
How to use an external speaker with QTrobot?
QTrobot supports USB speakers and USB sound card interfaces. You'll connect the device to the QTRP (Raspberry Pi) and point the sound system to the correct ALSA device.
1) Plug in the USB speaker / sound card
- Use the USB port on the QTRP (Raspberry Pi) at the back of the QTrobot.
2) SSH into QTRP and list audio devices
ssh developer@qtrp
su qtrobot
# List playback devices (card numbers & device numbers)
aplay -l
# Example output (truncated):
**** List of PLAYBACK Hardware Devices ****
card 0: b1 [bcm2835 HDMI 1], device 0: bcm2835 HDMI 1 [bcm2835 HDMI 1]
card 1: Headphones [bcm2835 Headphones], device 0: bcm2835 Headphones [bcm2835 Headphones]
card 2: ArrayUAC10 [ReSpeaker 4 Mic Array (UAC1.0)], device 0: USB Audio [USB Audio]
card 3: UACDemoV10 [UACDemoV1.0], device 0: USB Audio [USB Audio]
In this example, the external USB speaker is UACDemoV10 card 3, device 0, so its raw ALSA device string is: hw:3,0
3) Configure QTrobot to use the external device
Edit the QTrobot interface config (/opt/ros/noetic/share/qt_robot_interface/config/qtrobot-interface.yaml) and set playback_device to the ALSA string from step 2:
playback_device: hw:3,0
4) Restart the qt_robot_interface (or alternatively reboot the QTrobot):
sudo systemctl restart qt_robot_interface.service